Projet en développement avancé
SCUREDGE
Robot mobile autonome de détection de gaz pensé comme un système complet
SCUREDGE est mon projet le plus complet à ce jour. L’objectif n’était pas seulement de faire rouler un robot, mais de concevoir un système mobile autonome crédible, où la mécanique, l’électronique, le logiciel, l’intégration et l’usage forment un ensemble cohérent. Ce projet a été mené seul, sur environ un an, en parallèle de mes études et de mon alternance.

Pourquoi ce robot existe
SCUREDGE a d’abord été pensé comme une démonstration complète de ma capacité à concevoir un robot mobile autonome cohérent, du design mécanique jusqu’à l’architecture logicielle.
Le cas d’usage retenu est l’inspection industrielle et la détection de gaz. Le robot doit pouvoir évoluer dans une zone, remonter des informations utiles et, à terme, gagner en autonomie pour réduire la dépendance à une présence opérateur permanente.
Au-delà de la fonction, je voulais surtout construire un robot crédible, propre, maintenable et techniquement juste.
Conception et réalisation
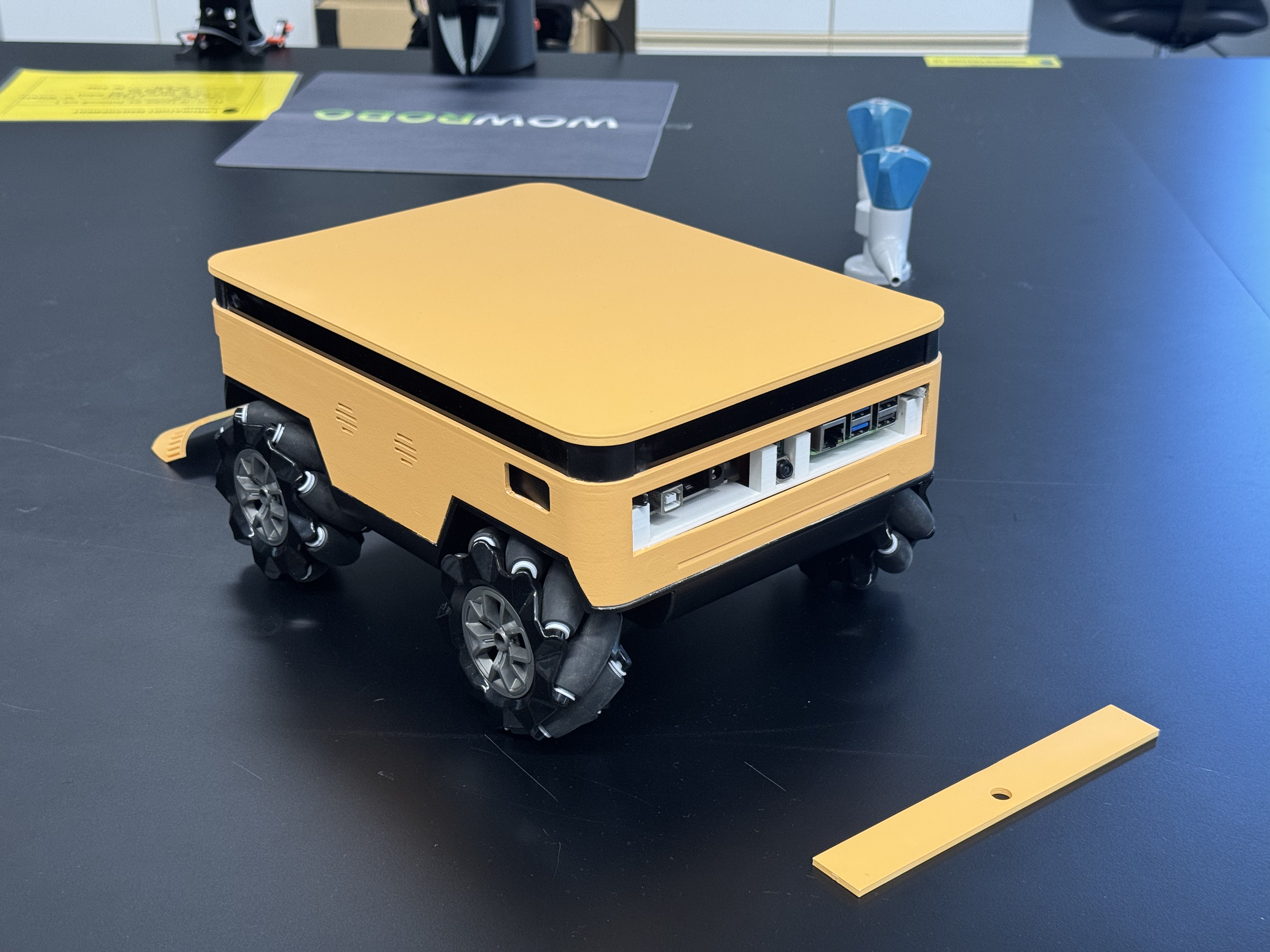
SCUREDGE a été entièrement conçu par mes soins, depuis l’idée initiale jusqu’au robot actuel. Le design a été pensé de zéro puis modélisé sur SolidWorks, avec plusieurs itérations avant d’arriver à une forme plus propre et plus cohérente que les premiers concepts.
La structure repose sur une plaque d’aluminium usinée par mes soins, qui sert de base mécanique au robot. Les éléments de structure et d’habillage ont ensuite été imprimés en 3D en PLA blanc.
Pour obtenir un rendu plus propre, les pièces imprimées ont été poncées, apprêtées, peintes en plusieurs couches puis vernies. Cette étape faisait pleinement partie du projet : je voulais un robot fonctionnel, mais aussi soigné et lisible visuellement.
La partie la plus difficile a été de faire tenir la mécanique. Au-delà du design extérieur, il fallait faire coexister correctement volumes, accès, composants, locomotion et logique d’assemblage.
Design, détail et logique d’usage
Le design de SCUREDGE cherchait un équilibre clair entre esthétique et fonction. L’idée n’était pas de produire une coque décorative, mais un objet cohérent dans son usage, son intégration et sa lecture visuelle.
L’arrière du robot intègre une trappe d’accès rapide aux batteries. À l’avant, une autre trappe permet d’accéder aux connecteurs de maintenance via un système de boutons poussoirs latéraux.
La coque supérieure elle-même est amovible, ce qui simplifie fortement l’accès à l’architecture interne. Tous ces éléments démontables sont maintenus par des aimants, avec un compromis volontaire entre maintien en mouvement et retrait simple par l’utilisateur.
Le lidar est intégré derrière une bande en acrylique infrarouge, ce qui permet de conserver une lecture propre du robot tout en gardant une fonction pleinement opérationnelle.
Ce soin du détail, de l’assemblage et de la maintenance fait partie intégrante du projet.
Architecture du système
Mécanique
Le robot repose sur une base aluminium et une structure imprimée en 3D pensée pour intégrer proprement locomotion, capteurs, accès et habillage.
Locomotion
SCUREDGE utilise quatre roues mecanum, choisies pour permettre une locomotion omnidirectionnelle et une meilleure maniabilité dans des zones contraintes, tout en conservant une mécanique lisible.
Calcul & contrôle
Le Raspberry Pi 5 16 Go prend en charge ROS 2 et les briques haut niveau. Un Arduino Mega gère l’acquisition bas niveau et le pilotage des moteurs, avec une séparation volontaire pour ne pas surcharger inutilement le calculateur principal.
Capteurs
Le robot embarque quatre capteurs de gaz différents pour couvrir une large gamme de gaz, un lidar pour la perception de l’environnement, ainsi qu’une caméra grand angle pour le retour visuel.
Logiciel
L’architecture logicielle s’appuie sur ROS 2, avec les briques déjà fonctionnelles de communication, télémétrie, lidar, caméra, URDF, odométrie et téléopération.
Autonomie
L’objectif final est un robot autonome capable de cartographier son environnement, de se déplacer intelligemment et d’être supervisé à distance. La téléopération est déjà fonctionnelle, tandis que Nav2, la cartographie et les comportements autonomes complets restent à finaliser.
État d’avancement
- Mécanique, électronique et intégration physique finalisées sur le robot actuel.
- Pilotage bas niveau, communication Arduino / Raspberry Pi et récupération des données fonctionnels.
- ROS 2, drivers capteurs principaux, odométrie, URDF et téléopération déjà en place.
- Configuration complète de Nav2, cartographie et autonomie encore en cours.
- Dashboard web identifié comme prochaine brique de supervision à finaliser.
Dashboard et exploitation
Le robot n’a pas seulement été pensé comme une plateforme mobile, mais aussi comme un système exploitable à distance.
L’objectif du dashboard web est de permettre le suivi en direct de la position du robot, la visualisation de la carte produite, l’affichage d’une heatmap des valeurs de gaz et le contrôle téléopéré.
Cette partie est clairement définie dans l’architecture du projet, mais n’est pas encore finalisée. Aujourd’hui, la téléopération et une partie de la supervision passent par Foxglove.
Simulation et validation
La simulation a constitué un outil important de validation dans le développement du projet.
Elle m’a permis de travailler certaines briques du robot dans un environnement contrôlé, d’accélérer les tests et de mieux préparer les comportements avant intégration complète sur le système réel.
Dans ce projet, la simulation n’est pas un accessoire visuel : c’est un vrai support de développement.
Ce que SCUREDGE démontre
- La capacité à concevoir seul un robot mobile autonome comme un système complet.
- La capacité à faire tenir ensemble design, mécanique, électronique, logiciel et intégration.
- Une sensibilité forte au détail, à la maintenance, au montage propre et à la cohérence produit.
- Une manière de travailler orientée exécution réelle, pas simple démonstration théorique.
Prochaine itération
Une amélioration naturelle du robot serait la création d’un PCB dédié. Cela permettrait de réduire le nombre de fils, de rendre le montage encore plus propre, d’améliorer la répétabilité de l’intégration et de limiter certains coûts d’assemblage. Ce type d’évolution s’inscrit dans la continuité du projet : aller d’un robot déjà cohérent vers une architecture encore plus propre et plus maîtrisée.
Médias et vues de travail

Robot assemblé et peint
Ouverture des trappes avant et arrière pour les connecteurs et les batteries.
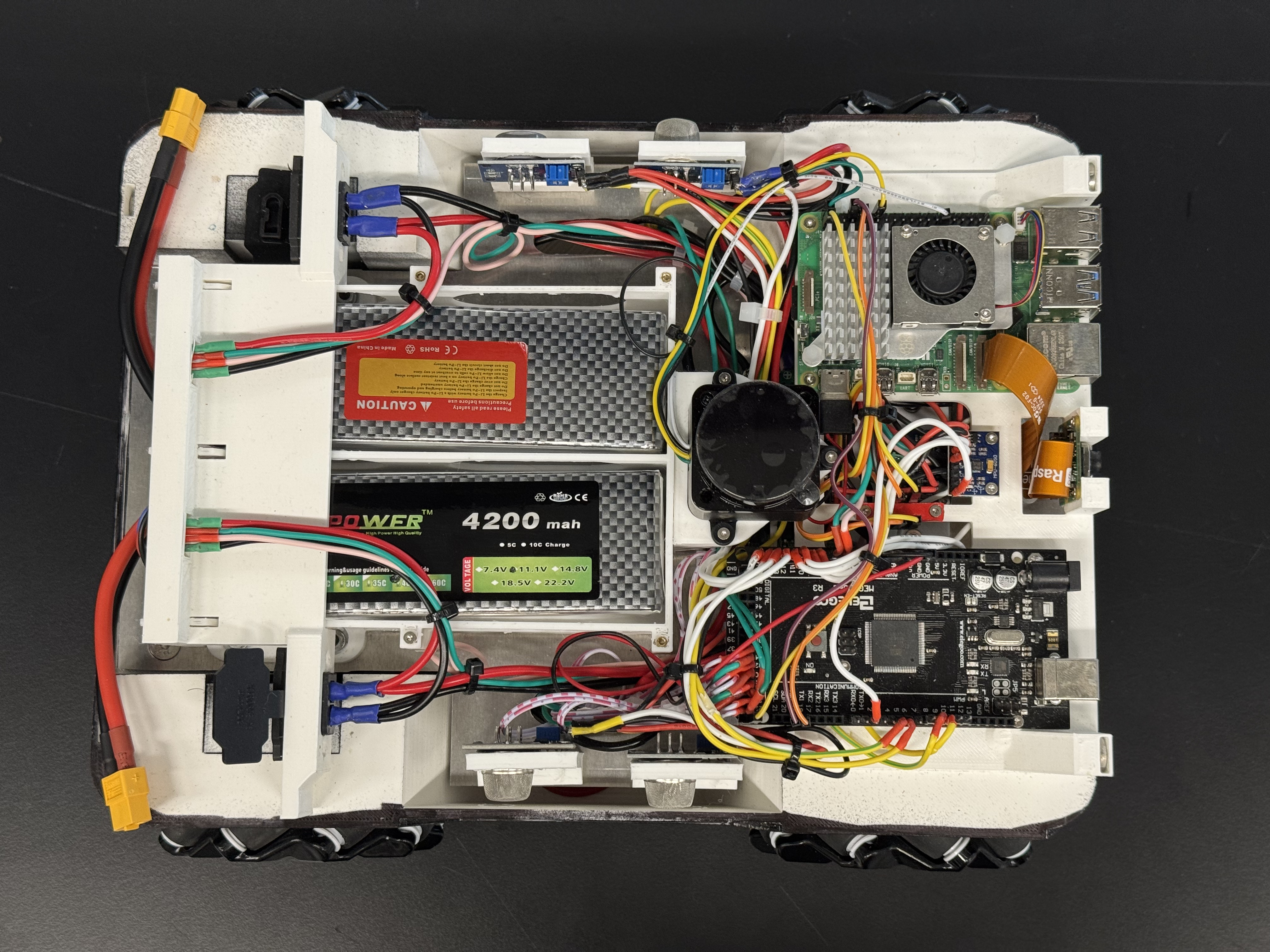
Architecture interne du robot
Prototypage
Contact
Parlons-en
Si vous souhaitez échanger sur SCUREDGE, son architecture ou ce qu’il démontre sur mon profil, vous pouvez me contacter directement.
francoismarty.work@gmail.com
Prendre contact