Advanced development project
SCUREDGE
A complete autonomous mobile robot built for industrial gas inspection
SCUREDGE is the most complete project I have built so far. The goal was not simply to make a robot move, but to design a credible autonomous mobile system in which mechanics, electronics, software, integration, and actual use all form one coherent whole. I carried out this project on my own over roughly one year, alongside engineering school and my apprenticeship.

Why this robot exists
SCUREDGE was first conceived as a complete demonstration of my ability to design a coherent autonomous mobile robot, from mechanical design to software architecture.
The chosen use case is industrial inspection and gas detection. The robot is meant to move through an area, report useful information, and eventually gain enough autonomy to reduce constant operator dependence.
Beyond the function itself, I mainly wanted to build a robot that felt credible, clean, maintainable, and technically sound.
Design and build process
SCUREDGE was fully designed and built by me, from the initial idea to the current robot. The design was created from scratch and modeled in SolidWorks, with several iterations before reaching a cleaner and more coherent form than the first concepts.
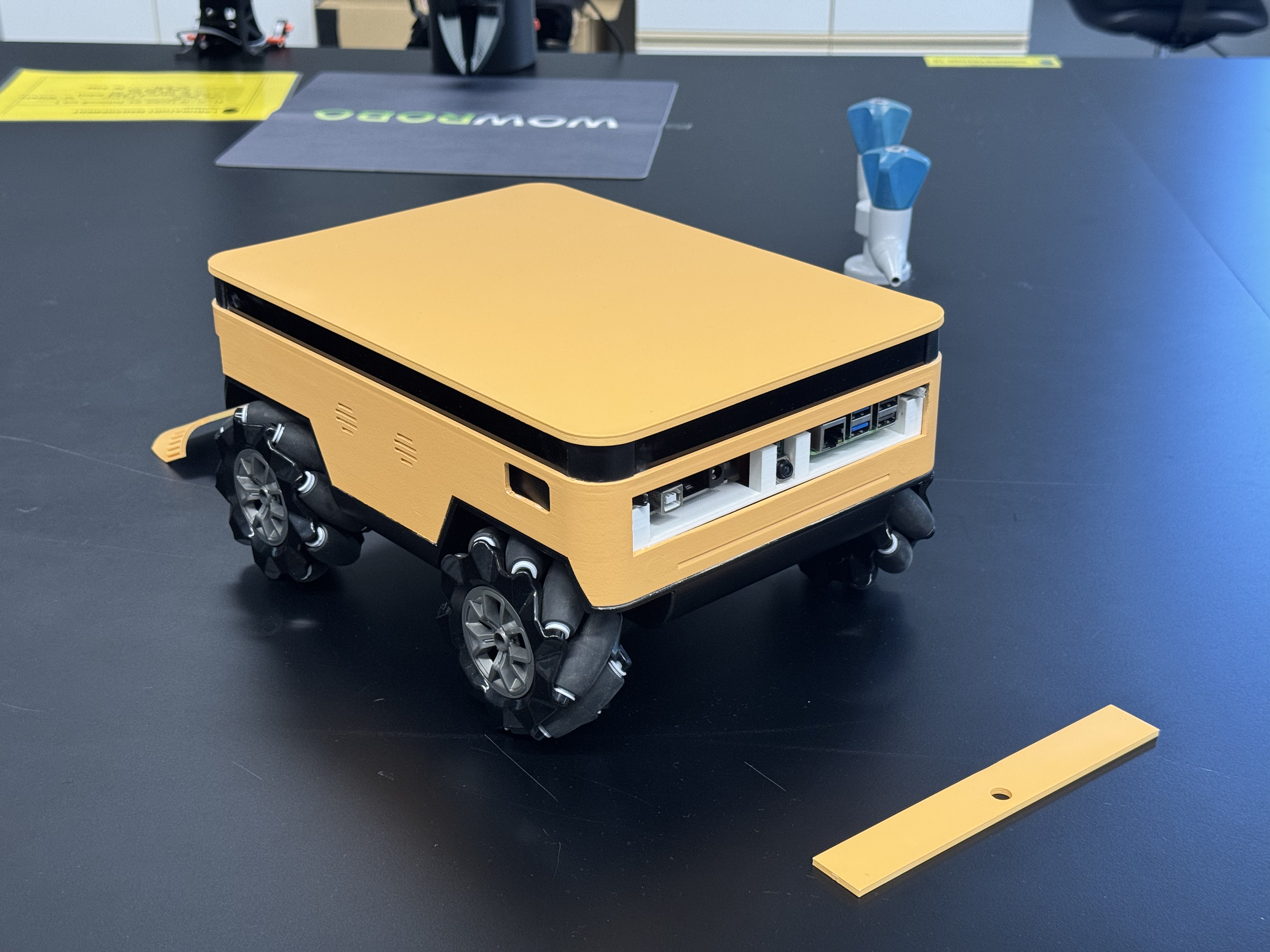
The structure relies on an aluminum base plate that I machined myself, which acts as the robot’s mechanical foundation. The structural and outer parts were then 3D printed in white PLA.
To achieve a cleaner result, the printed parts were sanded, primed, painted in several coats, and finally clear-coated. This was fully part of the project: I wanted a robot that was functional, but also visually clean and readable.
The hardest part was making the mechanics work as a whole. Beyond the outer design, volumes, access points, components, locomotion, and assembly logic all had to coexist properly.
Detail, design, and maintenance logic
The design of SCUREDGE aimed for a clear balance between aesthetics and function. The goal was not to create a decorative shell, but a coherent object in its use, integration, and visual readability.
The rear of the robot integrates a quick-access battery hatch. At the front, another hatch gives access to maintenance connectors through a side push-button system.
The upper shell itself is removable, which makes access to the internal architecture much easier. All removable parts are held by magnets, with a deliberate trade-off between secure retention in motion and easy removal by the user.
The lidar is integrated behind an infrared acrylic band, which helps preserve a cleaner reading of the robot while keeping the function fully operational.
That level of care for detail, assembly quality, and maintenance logic is part of the project itself.
System architecture
Mechanics
The robot relies on an aluminum base and a 3D-printed structure designed to integrate locomotion, sensors, access points, and outer panels cleanly.
Locomotion
SCUREDGE uses four mecanum wheels chosen to enable omnidirectional motion and better maneuverability in constrained environments while keeping the mechanical architecture readable.
Computing & control
A Raspberry Pi 5 with 16 GB handles ROS 2 and the high-level software blocks. An Arduino Mega manages low-level acquisition and motor control, as a deliberate separation to avoid overloading the main computer.
Sensors
The robot integrates four different gas sensors to cover a broad range of gases, a lidar for environmental perception, and a wide-angle camera for visual feedback.
Software
The software stack is built on ROS 2, with already functional communication, telemetry, lidar, camera, URDF, odometry, and teleoperation building blocks.
Autonomy
The final goal is a robot able to map its environment, navigate intelligently, and be supervised remotely. Teleoperation already works, while full Nav2 configuration, mapping, and complete autonomous behaviors remain to be finalized.
Current progress
- Mechanics, electronics, and physical integration are complete on the current robot.
- Low-level control, Arduino / Raspberry Pi communication, and sensor data acquisition are functional.
- ROS 2, the main sensor drivers, odometry, URDF, and teleoperation are already in place.
- Full Nav2 configuration, mapping, and autonomy are still in progress.
- The web dashboard has been identified as the next supervision layer to finalize.
Dashboard and remote operation
The robot was not only designed as a mobile platform, but also as a system that can be operated remotely.
The goal of the web dashboard is to provide live position tracking, map visualization, a gas-value heatmap, and teleoperation control.
This part is clearly defined in the project architecture, but it is not finished yet. At the moment, teleoperation and part of the supervision workflow go through Foxglove.
Simulation and validation
Simulation has been an important validation tool in the project.
It allowed me to work on several parts of the robot in a controlled environment, speed up testing, and better prepare behaviors before full integration on the real system.
In this project, simulation is not a visual accessory: it is a real development support.
What SCUREDGE demonstrates
- The ability to design an autonomous mobile robot alone as a complete system.
- The ability to make design, mechanics, electronics, software, and integration work together.
- A strong sensitivity to detail, maintenance, clean assembly, and product coherence.
- A way of working grounded in real execution rather than theoretical demonstration.
Next iteration
A natural improvement for the robot would be the design of a dedicated PCB. It would reduce the amount of wiring, make the assembly cleaner, improve integration repeatability, and limit some assembly costs. That kind of evolution is fully in line with the project: moving from an already coherent robot toward an even cleaner and more controlled architecture.
Media and working views

Assembled and painted robot
Opening of the front and rear access panels for connectors and batteries.
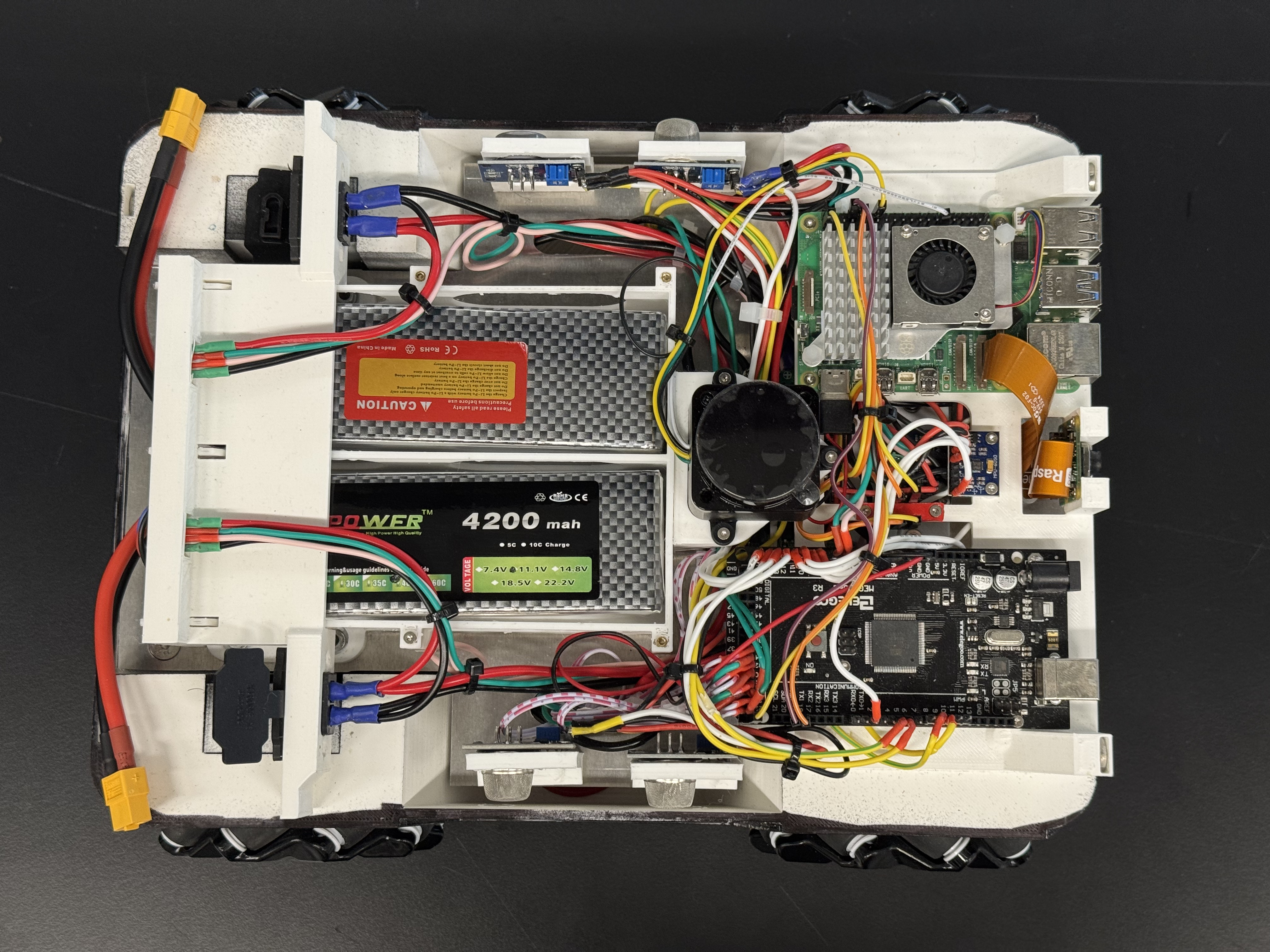
Internal robot architecture
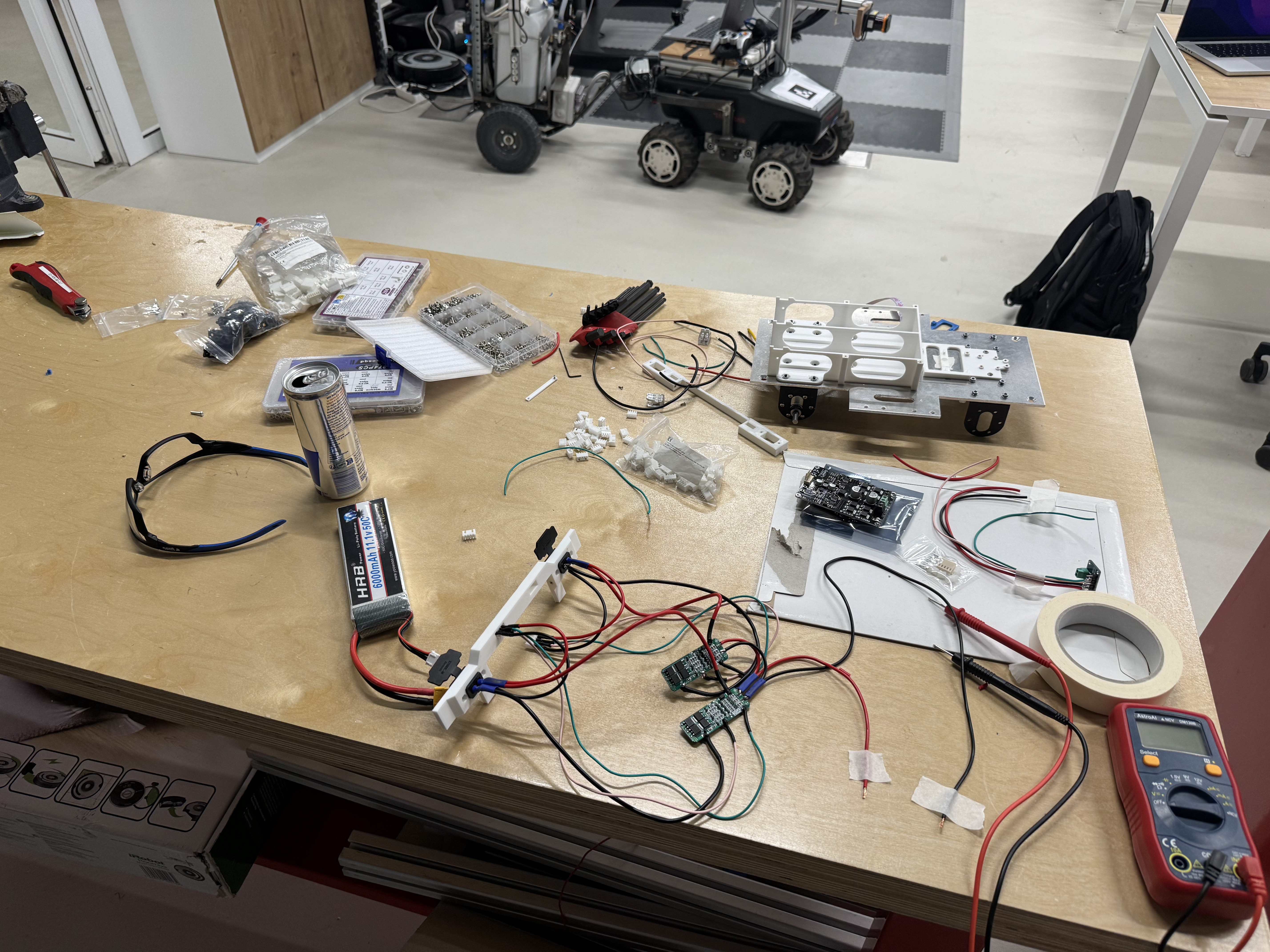
Prototyping
Contact
Let’s talk
If you would like to discuss SCUREDGE, its architecture, or what it demonstrates about my profile, feel free to contact me directly.
francoismarty.work@gmail.com
Get in touch