Projet étudiant réalisé en autonomie
PATHFINDER
Premier robot autonome étudiant conçu de zéro pour sortir d’un labyrinthe
Pathfinder est mon premier vrai projet de robotique réalisé seul en école d’ingénieur. L’objectif était de concevoir, à partir d’un ensemble de composants imposés, un robot capable de sortir automatiquement d’un labyrinthe. Ce projet m’a surtout appris à transformer une contrainte simple en système cohérent, propre mécaniquement et fonctionnel.
Un projet fondateur sous forte contrainte
Pathfinder a été mon premier projet étudiant mené seul, avec une consigne claire : concevoir un robot à partir d’un nombre très limité de composants imposés.
La contrainte faisait partie du projet. Il fallait faire tenir la locomotion, la détection, l’alimentation et la structure dans un système simple, crédible et réellement fonctionnel.
Avec seulement deux servomoteurs, un Arduino, un capteur ultrason, un boîtier de piles et des pièces imprimées en 3D, l’intérêt n’était pas d’ajouter de la complexité artificielle, mais de concevoir juste.
Un design mécanique volontairement ambitieux
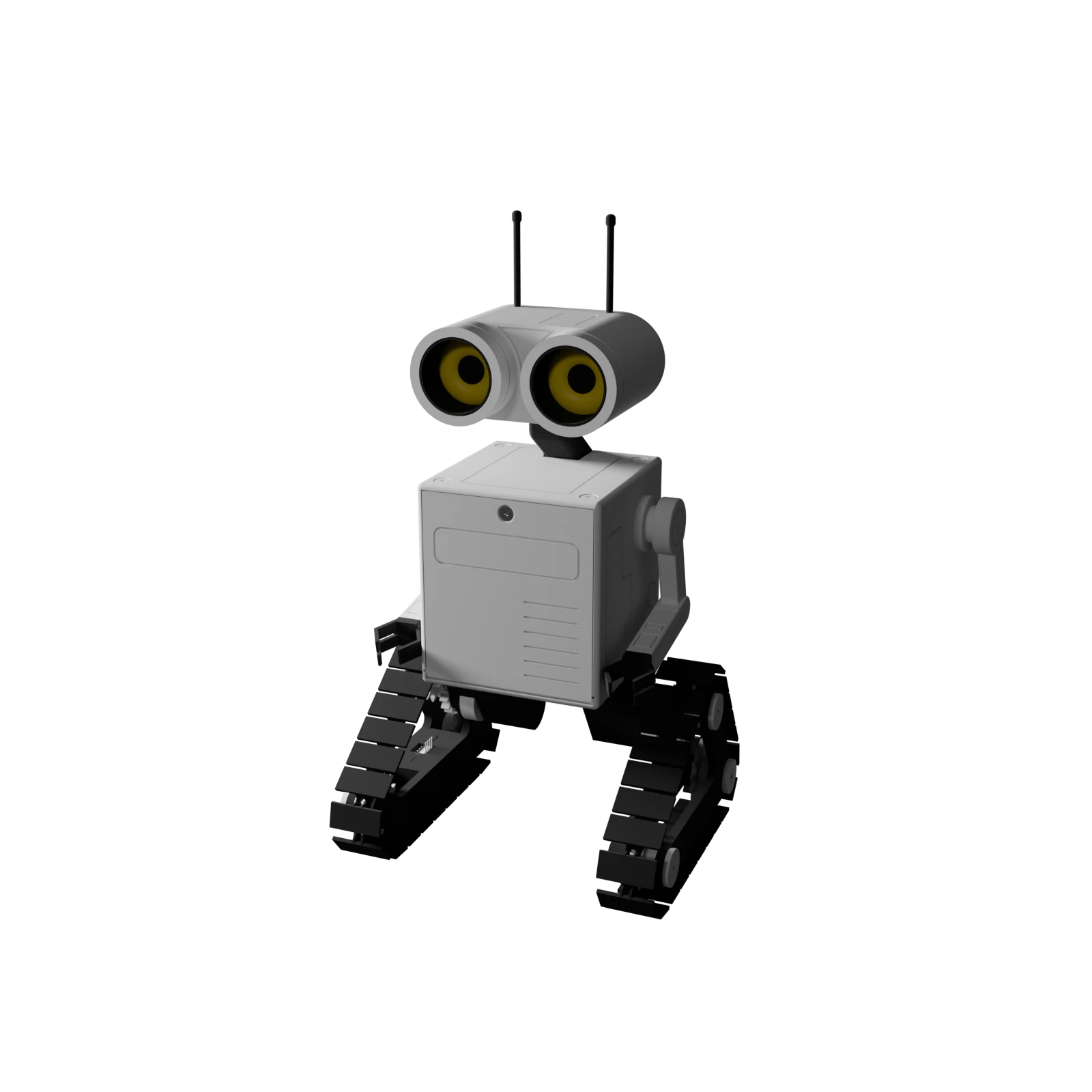
Je me suis inspiré de Wall-E pour le design du robot.
Ce choix m’a amené à utiliser des chenilles plutôt que des roues, ce qui m’a imposé une contrainte mécanique plus élevée que nécessaire pour un robot de ce type.
J’ai aussi volontairement travaillé la propreté d’intégration : aucun fil apparent, boîtier de piles caché dans le dos, et accès à l’alimentation par une trappe intégrée proprement dans la structure.
Même à cette échelle, je voulais déjà que le robot ressemble à un objet cohérent plutôt qu’à un assemblage scolaire brut.
Une logique simple, assumée et efficace
La logique de navigation reposait sur un principe volontairement simple : suivre en permanence le mur de droite.
L’objectif n’était pas de développer un algorithme complexe, mais d’obtenir un comportement fiable avec peu de ressources matérielles et logicielles.
Ce projet m’a appris qu’un système peut être techniquement modeste tout en étant juste dans sa conception si la stratégie, la mécanique et l’intégration sont cohérentes.
Ce que Pathfinder m’a appris
Pathfinder a été une première étape importante dans ma manière de penser la robotique.
J’y ai appris que les choix mécaniques comptent autant que le code, que la contrainte peut améliorer un projet, et qu’un robot gagne beaucoup en crédibilité quand son intégration est propre.
C’est un petit robot, mais un projet fondateur dans mon parcours.
Contact
Parlons-en
Si vous voulez échanger sur Pathfinder ou sur ce qu’il représente dans mon parcours, vous pouvez me contacter.
francoismarty.work@gmail.com
Prendre contact